 |
 |
|
  |
|
|
|
|
|
|
|
|
|
|
|
 |
 |
|
|
|
|
|

Applications of haptic interfaces
 |
|
By using haptic interface devices, users can feel and manipulate virtual 3D objects with force and tactile feedback. For example, we have developed a haptic painting system with a focus on the pencil and paper. |
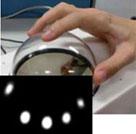
Non-planar multi-touch interface
 |
|
Conventional multi-touch interface is planar in shape. We have developed hemispheric (dome-shaped) multi-touch device and proposed unique interaction methods. |
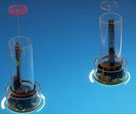
HATS (Height-Adjustable Tangbiles)
 |
|
HATs are active tangibles with 4 degrees of freedom that are capable of moving, rotating, and changing height. By adding height as an additional dimension for manipulation and representation, HATs offer more freedom to users than ordinary tangibles. HATs support bidirectional interaction, enabling them to reflect changes in the digital model via active visual feedback and to assist users via haptic feedback. |
 |
|
RoboTable is a mashup project of physical robots, fiducial and multi-touch tracking on a table. This project is to develop an interactive system in which human can interact with both virtual objects displayed on tabletop surface and real objects such as robots |
 |
|
CarettaKids is the extented version of Caretta. CarettaKids is used for enhancing school children's collaborative learning about urban planning and environmental issues in face-to-face settings. In CarettaKids, a group of children sits around a multiple input device (a sensing board) and manipulates physical pieces in an immersive environment. Each of the children is also provided with a PDA for her own personal space. Children in CarettaKids can conduct design tasks collaboratively in the shared space and individually in their own personal spaces. In order for children to seamlessly work on both spaces, CarettaKids allows the children to transition between two spaces in an intuitive manner. |
 |
|
We have developed a system called Caretta that integrates personal and shared spaces to support face-to-face collaboration. We use PDAs and a multiple-input sensing board for personal and shared spaces, respectively. Users of Caretta can discuss and negotiate with each other in the shared space by manipulating physical objects, while they individually examine their ideas in their own personal spaces. Caretta allows users to participate in group activities interchangeably and seamlessly using both these spaces. Caretta is applicable to various collaborative tasks. In this paper, it supports users in urban planning tasks. User studies of Caretta demonstrated that it allowed users to collaborate in a flexible fashion: users could work individually in their personal spaces at their own pace, cooperatively work together in the shared space, and smoothly transition between both of the spaces. |
|
|
 |
|
|