Robot
提案するプラットフォーム上で使用されるロボットの設計に当たり、以下の条件を設定しました。
1) 複数のロボットを同時に動作させられるよう、なるべく小さくすること;
2) ロボットをDIでトラッキングできること;
3) 高い機動性(maneuverability)を持つこと;
4) テーブルトッププラットフォームとの通信機能を持つこと;
5) 見栄えがよいこと;
ロボットの大きさは、カメラでの認識性能に影響を与えます。そのため、安定的な認識のためには、ロボットのベースプレートに取り付けられるfuducialマーカーを大きくすればよいということになります。しかし(条件1)を満たすためには、マーカーはできるだけ小さくする必要があります。そこで、マーカー中の最小単位である白ドットの直径を我々のプラットフォームが高い精度で観測できる5mmに、ベースプレートとテーブル表面との距離を0.5 mmにすることで、安定したトラッキング(条件2)が可能なことを実験により確認しました。この設計により、ベースプレートは直径100mmとなり。手のひらサイズのロボットとなりました。設計当初はマーカーを紙に印刷し、ベースプレートに貼り付けていましたが,紙が劣化することでマーカーの認識が難しくなるため。長期的利用には適さないと判断しました。そこで、アクリルの白いベースプレートに黒スプレーで色を付け、それを加工機で0.2mmだけ削り込むことにより、マーカーを作成しています。
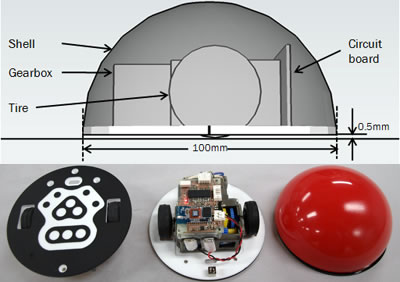
ロボットは2つのモータとギアボックスを実装しており、テーブル上を自由に動き回れる機動性(条件3)があります。また、条件4を満足するため、各ロボットにBluetoothモジュールを実装しました。ロボットとプラットフォームは、次の手順で通信を行います。(1)テーブル上にロボットが配置されると、(2)ベースプレートのマーカーによってロボットのIDが認識されます。IDとBluetoothのアドレスは関連付けられているため、(3)本プラットフォームはBluetoothを介して自動的にロボットとの通信を行います。 条件5に対しては、半球状のアクリルカバーを取り付けることで見栄えに配慮しました。